Здравствуйте, сегодня мы поговорим об очень полезном специальном конечном элементе в Robot'е, он называться жесткие связи в русском варианте абсолютно жесткое тело. Важно отметить что, жесткие связи действуют между узлами, они могут быть присоединены к любым типам конечных элементов (стержневые элементы или пластины). Второе важно замечание жесткие связи могут использоваться только в типах задач где присутствуют вращательные степени свободы. Третье замечание мастер-узел жесткой связи нельзя использовать на вращательной опоре. Приступим...
Вызвать функцию ввода Жесткий связи можно через Главное меню-Дополнительные атрибуты-Жесткие связи

Или через панель Модель конструкции вызвать панель Определение конструкции



Вызвать функцию ввода Жесткий связи можно через Главное меню-Дополнительные атрибуты-Жесткие связи
Или через панель Модель конструкции вызвать панель Определение конструкции
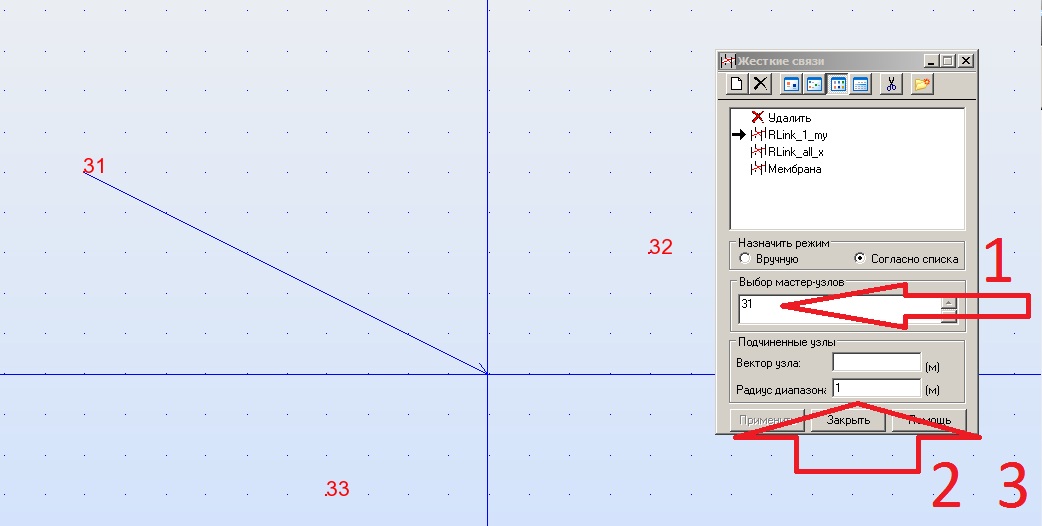
В открывшемся окне Жесткие связи создаем новую связь, и определяем закрепленные степени свободы. Жесткие связи в Robot вводятся двумя способами в ручном режиме и согласна списка узлов.
1. В ручном режиме нужно указать мастер узел (любой узел схемы, узел через который идет управление жесткой связью), затем выбрать подчиненные узлы.
2. Второй способ согласно списка, в начале необходимо выбрать мастер узел, затем нужно выбрать вектор узла (вектор с началом в мастер-узле и до центра окружности в которую попадут подчиненные узлы). Третьим этапом мы задаем радиус окружности.
Конечно же для лучшего понимания процесса задания жестких связей видео урок.